
|
|
DT Receiver - Rx43d Instructions - v3.4.4
|
|
1. GENERAL:
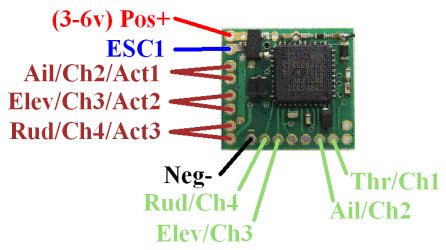
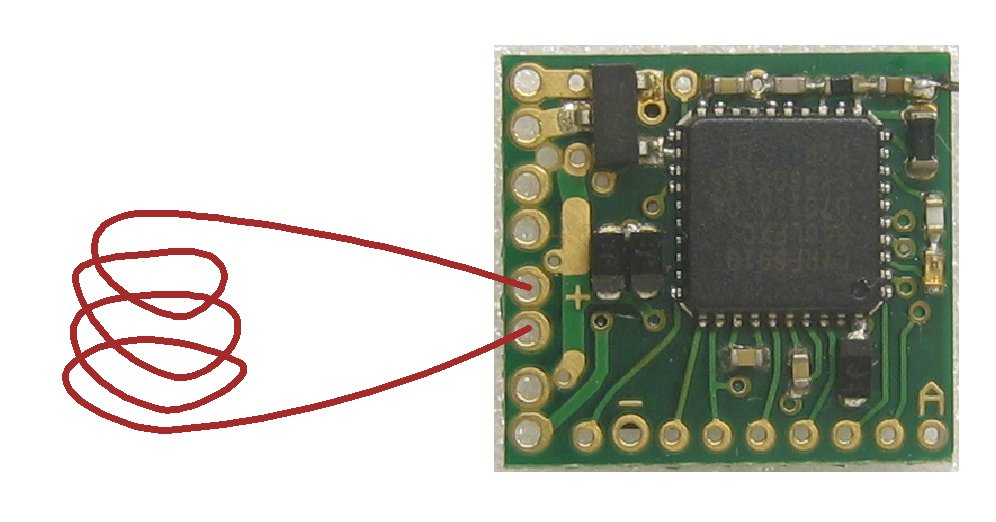
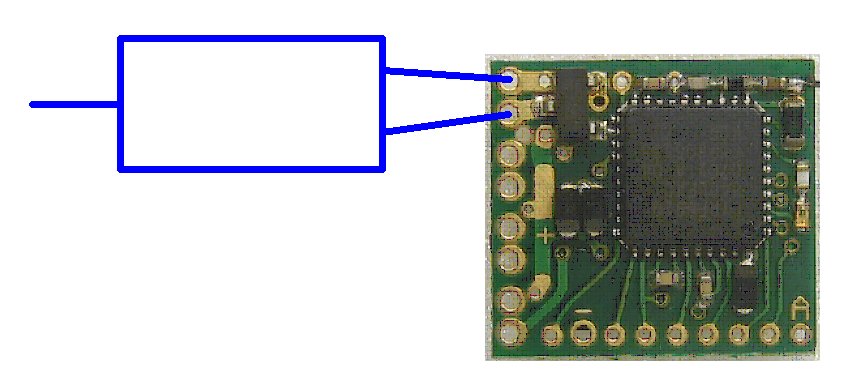
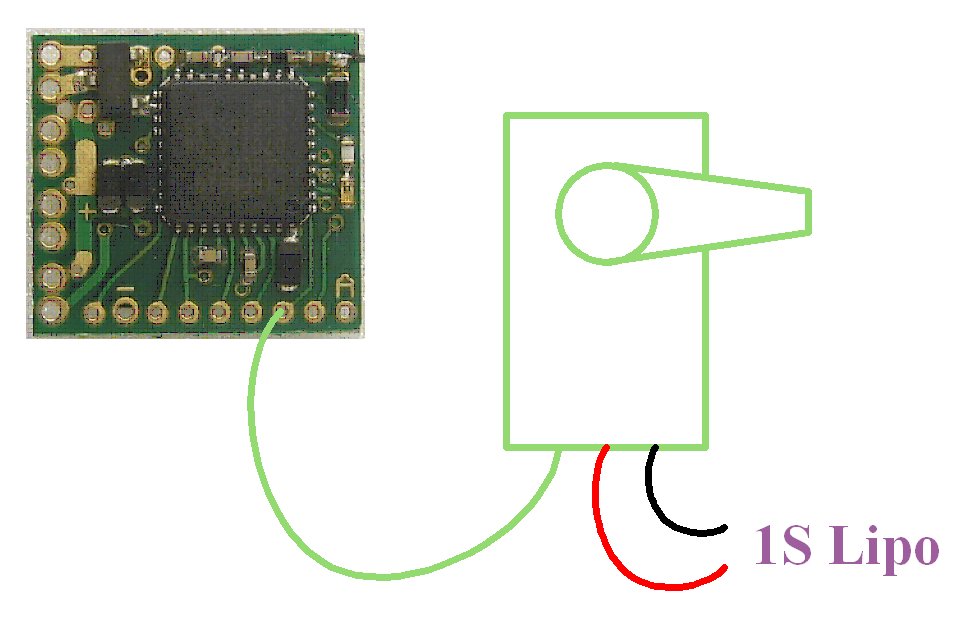
3-6v may be connected with correct orientation to +/- points.
The Rx is not insulated so take care to avoid short circuits.
The PCB is thin so do not bend it or exert great force on it.
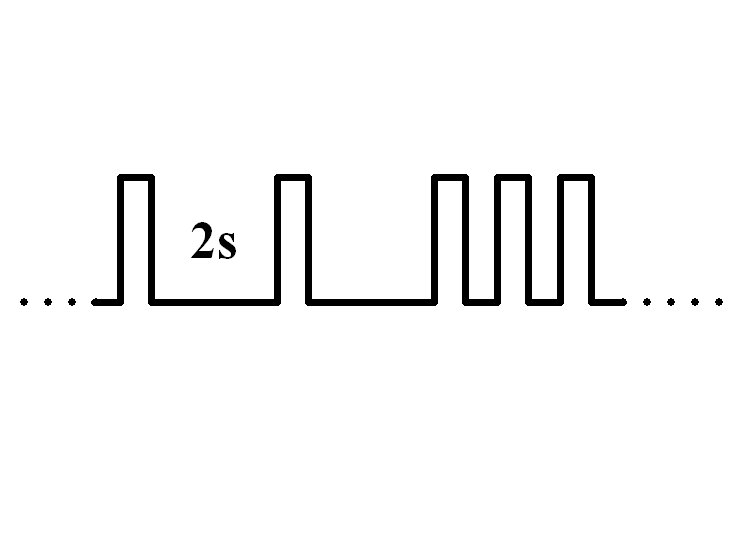
2. LED:
Led On = perfect reception (real-time indicator).
1 flash = Scanning (~2sec between flashes; wrong model if never stops).
2 flash = Brownout (receiver voltage went too low; check battery/servo load).
3. FAILSAFE:
Outputs are not driven (do nothing) on startup and while scanning.
Outputs 'hold' on short signal losses (<1sec) and then do nothing (>1s).
4. BINDING:
1. Switch Rx on and wait ~20s until led flickers fast.
2. Switch Tx on in bind mode and Rx led should flash slowly and then go solid.
3. Change distance between Tx/Rx if binding does not work.
5.1 'SERVO' OUTPUTS:
Pads 1-4 will normally be used for servos or an external ESC on Pad1.
Pad 4 can be set to drive a second external ESC for 'dual-brushless' (see 5.5).
Pad 2 can be set to Sum-PPM for quadcopter type models.
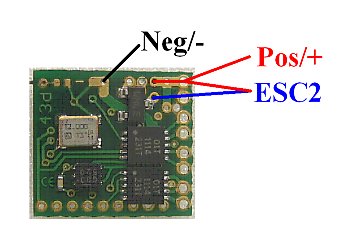
5.2 BRUSHED ESC's:
The motors connects to ESC1 or ESC2 and Positive+.
Set Ch1/Throttle throws to 100% and close throttle to arm the ESC's.
Differential thrust steering mix is optional and is enabled by setting 'mix' to 12.5-100% (0%=disabled).
5.3 LOW VOLTAGE CUTOFF:
A 3.0v LVC is enabled by default.
The ESC will rearm if the throttle is closed briefly.
The led will have a 2-flash if LVC is triggered.
5.4 'ACTUATOR' OUTPUTS:
Set channel throws to 100%.
The actuator outputs can drive 0.4A brushed motors with 2-direction (reversable) control.
5.5 'DUAL BRUSHLESS':
Pads 1 and 4 can drive two external ESC's (eg: brushless) with steering mix.
6. EXAMPLE CONNECTIONS:
|
|
|
7.1 PROGRAMMING:
|
|

|
1. Switch Transmitter on.
2. Make sure Ch3 (Elevator) is normal direction (not reversed).
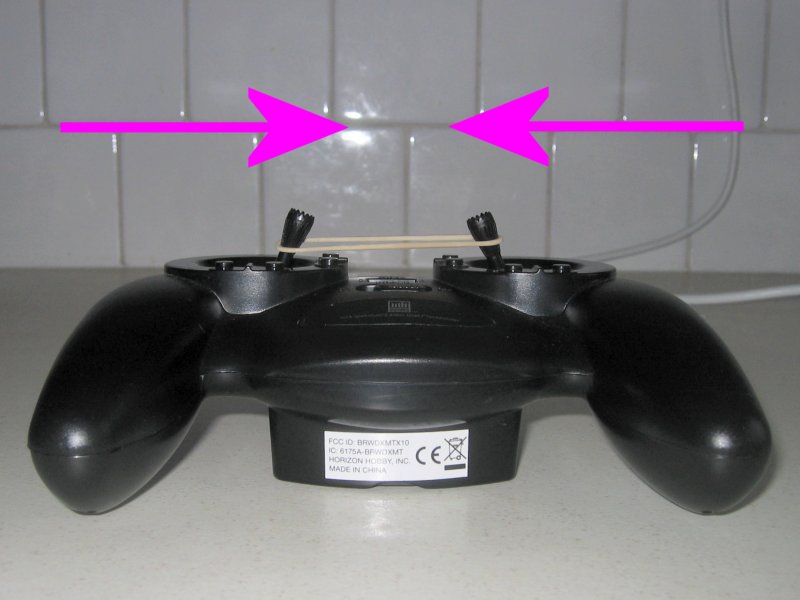
3. Hold left/right sticks (Ch2/4) in towards middle of Tx.
4. Switch Receiver on and wait for the Led to flicker very fast.
5. Center all sticks.
6. The led flashes the setting for the first 'Level' (eg: 1-flash = 0% mix, 2-flash = 12.5% mix).
7. Yes = push the Ch3 (Elevator) stick forward (to top of Tx) to accept this and advance to next Level.
8. No = pull the Ch3 (Elevator) stick back (to bottom of Tx) to see next option for same Level.
9. Continue through all Levels until Led comes on solid.
10. Settings are saved automatically at the end so switch off at any time to abort.
11. Say 'yes' to every item to just see what is currently set.
|
Enable twin-steer: Level 1: 1-flash NO, 2-flash NO, 3-flash YES = Option 3 (25%) & move to next level Level 2-6: YES to all. |
7.2 PROGRAM LEVELS / NUMBER OF FLASHES:
Level 1: Steering Mix %
1 = 0% (Default)
2 = 12.5%
3 = 25%
4 = 50%
5 = 100%
Level 2: Steering channel (for mix)
1 = Ch4/Rudder
2 = Ch2/Aileron (Default)
Level 3: Pad 1 output ('brushless 1')
1 = Normal Ch1/Throttle (Default)
2 = Throttle + Steering mix
Level 4: Pad 4 output ('brushless 2')
1 = Normal Ch4/Rudder output (Default)
2 = Throttle + Steering mix
Level 5: Low Voltage Cutoff (brushed ESC's only)
1 = Disabled
2 = Enabled (Default)
Level 6: Servo/Sum-PPM outputs
1 = Sum-PPM on Pin2 (not available)
2 = Serial on Pin2 (not available)
3 = Servo outputs on all pads (Default)