
|
|
Rx61-8 Instructions (v6.0.1/2)
|
|

|

|
1. DEFAULT SETUP
|
Item |
Setting | Details |
|
Purpose: |
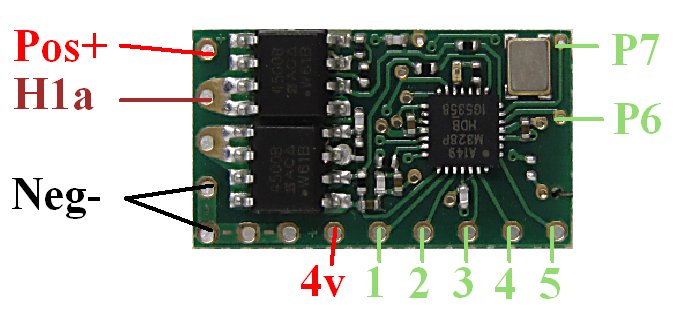
Rx61-8 |
'Conventional' with joystick transmitter 8 servo outputs (no motor) |
|
Red wire positive (+) Black wire negative (-) |
Battery |
3-16v Observe polarities |
|
Integrated BEC |
4v | Suitable to power 1 small servo |
|
H1 output |
Servo (Ch8) |
Standard servo The signal output is at battery voltage Regulate with zener diode and resistor |
|
P1 output |
Servo (Ch1) |
Standard servo |
|
P2 output |
Servo (Ch2) |
Standard servo |
|
P3 output |
Servo (Ch3) |
Standard servo |
|
P4 output |
Servo (Ch4) |
Standard servo |
|
P5 output |
Servo (Ch5) |
Standard servo |
|
P6 output |
Servo (Ch6) |
Standard servo |
|
P7 output |
Servo (Ch7) |
Standard servo |
|
Inactivity Sleep |
Disabled | |
| Binding | 2-pad |
P4+P5 |
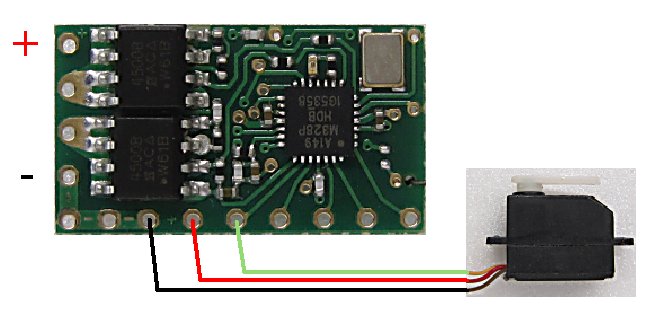
2. EXAMPLE CONNECTIONS:
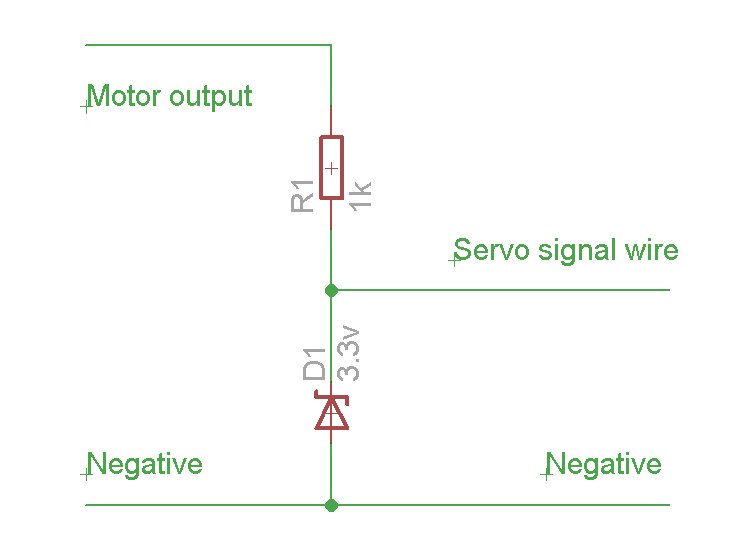 Servo on H1a output |
|
The H1a output is intended to control a motor. So this output is at battery voltage. This may be too high for the signal input on the servo. A zener diode and resistor is needed to limit the maximimum H1a voltage. 3.3v and 5v are common values for the zener.
The 4v BEC output is suitable to power ONE small servo when the Rx is powered with a higher voltage. More than one servo needs a separate 4-5v power supply (eg: 'UBEC'). When the Rx is powered with 1S lipo, all the servos would normally be powered direct from the lipo.
3. BINDING
Bind once:
1. Connect P4 to P5 with a temporary connection.
2. Switch Rx on and led will flicker fast.
3. Remove temporary connection between P4 and P5.
4. Switch Tx on in bind mode.
5. Rx led should flash slowly; wait for it to go solid.
Change distance between Tx/Rx if binding does not work.
4. LED:
Led On = perfect reception (real-time indicator).
1 flash = Scanning (~2sec between flashes; no signal or not bound if never stops).
5 flash = LVC/Brownout (voltage went too low; check battery/motor load).
5. FAILSAFE:
Outputs do nothing on startup and while scanning for a signal.
Servos 'hold' after signal loss.
6. OTHER:
This receiver has other features that are not described.
These are changed using a technique called 'programming':
| Version |
v6.0.2 v6.0.1 |