
|
|
Rx61-4 Instructions (v6.0.1/2)
|
|

|

|
1. DEFAULT SETUP
|
Item |
Setting | Details |
|
Purpose: |
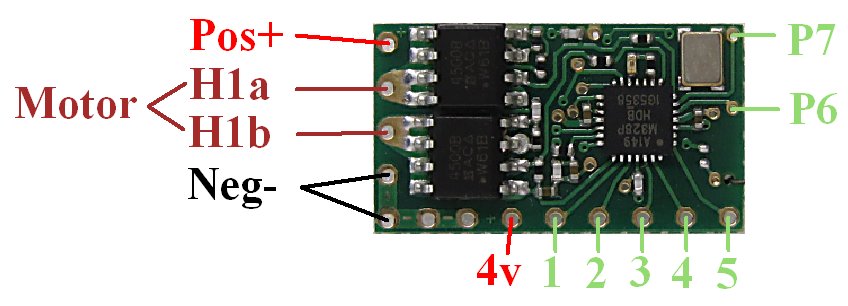
Rx61-4 |
'Conventional' with joystick transmitter |
|
Red wire positive (+) Black wire negative (-) |
Battery |
3-16v Observe polarities |
|
Integrated BEC |
4v | Suitable to power 1 small servo |
|
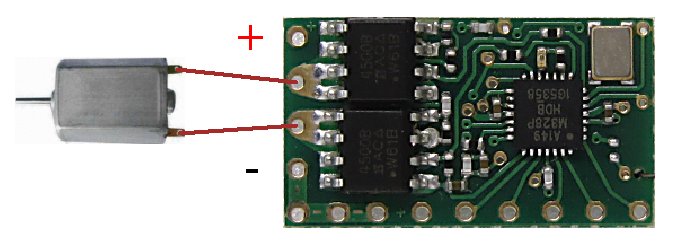
H1 output Brown wires |
Motor 'Elevator' (Ch3) |
Integrated forward/reverse ESC for brushed motors Center off |
|
P1 output |
Servo (Ch1) |
Standard servo |
|
P2 output |
Servo (Ch2) |
Standard servo |
|
P3 output |
Servo (Ch3) |
Standard servo |
|
P4 output |
Servo (Ch4) |
Standard servo |
|
P5 output |
Servo (Ch5) |
Standard servo |
|
P6 output |
Servo (Ch6) |
Standard servo |
|
P7 output |
Servo (Ch7) |
Standard servo |
|
Arming: |
Enabled |
Ch3 to center position (off) |
| LVC | Enabled |
LVC=Low Voltage Cutoff Led 5-flash if triggered Stop and charge battery |
| Inactivity Sleep | Enabled |
Invoked after 1hour Switch off and on to restart |
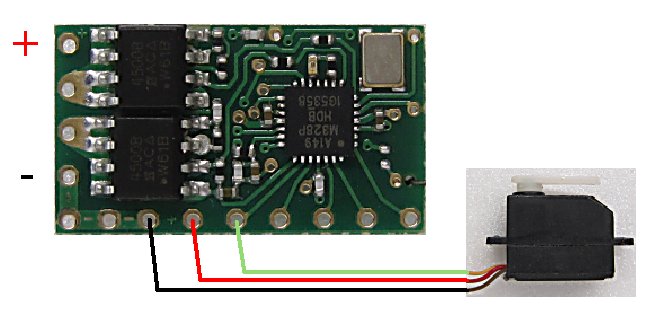
2. EXAMPLE CONNECTIONS:
|
|
The 4v BEC output is suitable to power ONE small servo when the Rx is powered with a higher voltage. More than one servo needs a separate 4-5v power supply (eg: 'UBEC'). When the Rx is powered with 1S lipo, all the servos would normally be powered direct from the lipo.
3. BINDING
Bind once:
1. Switch Rx on and wait ~20s until led flickers fast.
2. Switch Tx on in bind mode.
3. Rx led should flash slowly; wait for it to go solid.
Change distance between Tx/Rx if binding does not work.
4. LED:
Led On = perfect reception (real-time indicator).
1 flash = Scanning (~2sec between flashes; no signal or not bound if never stops).
5 flash = LVC/Brownout (voltage went too low; check battery/motor load).
5. FAILSAFE:
The motor output is not active on startup and while scanning for a signal.
The motor output 'holds' last known settings on short signal losses (<1sec) and then slows to a stop over 3 seconds.
6. OTHER:
This receiver has other features that are not described.
These are changed using a technique called 'programming':
| Version |
v6.0.2 v6.0.1 |